COLREGS
- The Rules are divided into five parts A-E - General Rules (A), Steering and Sailing (B), Lights and Shapes (C), Sound and Light (D) and Exemptions (E).
From 2013 Bluebird Marine Systems lobbied the IMO, asking them if they
planned on changing the rules of the ocean, in light of the possibility
of an autonomous circumnavigation, proposed at that time. The
IMO
replied, that they had no plans to change the rules to accommodate
unmanned waterborne vessels. On that basis, the specification for the
Elizabeth Swann was compiled.
Along
with BMS, who we succeeded, we believe that the rules can and should be
read in conjunction with the IMO's SDGs
in relation to climate
change (SDG13) and the need to reduce harmful emissions from ships
at sea (SDG14). The COLREGs were compiled in 1972, an age away and
wholly out of touch with robotic
and the possibility of solar powered ships, AI,
and the fact that unmanned vessels will outperform a human crew in terms
of persistent monitoring, any day of the week, month or year for that
matter - without food, toilets or sleep. All of this provided that
reliability is greater than we might reasonably expect from a biological
captain. Road vehicles, such as the Google car have demonstrated that autonomous
electric vehicles are more reliable - on their way and inevitable.
This
seems to have escaped the IMO, an organization that some perceive as a
lumbering giant, heading for extinction,
where it seems they cannot keep pace with the real world. Indeed, one might argue
that laws that no longer reflect current practices are of themselves
unlawful. Where laws are man-made, and man has a duty to their fellow
men to provide an effective administration. Hence, where that
effectiveness is lost through inaction or ability to act in good time,
said laws need not be accepted as legally binding. Especially where, in not
allowing safer vessels to compete with vessels less able to cope with
navigation tasks, the IMO are seen to be a Red Flag organization.
Hence, we have compiled a checklist to be sure we have taken account of
the Regulations - and also to assist the IMO with potential policy
revisions. NOTE: This is a voluntary set of actions.
A
good argument in law, by way of a defence against any prosecution, is
that the
IMO would have to prove that an autonomous vessel was inferior and the
party at fault. In a road vehicle, an MOT is required to drive a car or
truck. Such certificate, together with a schedule of maintenance
(Service History) would normally defeat any claim as to negligence, but
causing death by dangerous driving is always an issue for insurers,
nervous about claims. A
robotic ship would always follow a set of rules, where it cannot deviate
in reckless fashion subject to mood swings or substance abuse. In the
case of an accident at sea a counterclaim as to malicious prosecution would be
interesting in setting a case precedent as to duties of authorities. In the UK see the
Wednesbury Rule of Reasonableness in civil litigation and the High Court
ruling as to 'Duty.'
Good
luck with that hypothetical scenario! We'd bet on the robot ship every time.
Hence, for operators of autonomous vessels, don't forget the 'dashcam(s)' for evidence of who was at fault.
Alternatively, operators might register in a
country that is not a contracting party. Outside territorial waters, the
UN have failed to prosecute those dumping fishing
nets and plastic waste from rivers,
where it is the Country that is responsible. Even though this is
illegal!
Regardless
of the perceived lack of policing or advance guidance, as far as the Foundation is
concerned, the
proviso is that any robotic ship is well designed and capable of
operating with at least equal performance, but preferably with superior
reaction times, sight and hearing, fitted with an autonomous navigation system that is
at least as reliable as the best autopilots currently available, and capable
of interacting with its environment with equal or superior clarity to a
human counterpart. This duty rests with the operator of the vessel.
Hence, don't let the unmanned side down by using inferior equipment.
This
falls to be considered more under construction and use regulations - and
certification.

DINOSAURS
BEMCOME EXTINCT - In the opinion of many operators looking to streamline their fleet,
the IMO need to get a grip. More efficient passages, means less
pollution. You do not need a crystal ball to see what lays ahead. It
might pay the incumbents to clean their glasses from time to time. The
dinosaurs could not adapt in time. We wonder if the IMO is capable of
doing that, or is leading us to a collision course with extinction.
That
said, we believe that the Elizabeth
Swann is compliance ready in principle - the first ship in the world to be able to
(substantially) claim to be so.
The 1972 Convention was designed to update and replace the Collision Regulations of 1960 which were adopted at the same time as the 1960 SOLAS Convention.
One of the most important innovations in the 1972 COLREGs was the recognition given to traffic separation schemes - Rule 10 gives guidance in determining safe speed, the risk of collision and the conduct of vessels operating in or near traffic separation schemes.
The first such traffic separation scheme was established in the Dover Strait in 1967. It was operated on a voluntary basis at first but in 1971 the IMO Assembly adopted a resolution stating that that observance of all traffic separation schemes be made mandatory - and the COLREGs
subsequently made this obligation clear.
Mostly,
policy makers follow innovators in all walks of life, for they do not
have the vision or the expertise to be able to see ahead of the current
state of play. If they did, they'd be the innovators. For
this reason it is up to engineers and scientists to pave the way for our
political administrations.
FEBRUARY
2020 Department of Engineering Cybernetics, Centre for Autonomous Marine Operations and Systems, Norwegian University of Science and Technology,
Trondheim, Norway
Hybrid Collision Avoidance for ASVs Compliant With COLREGs Rules 8 and 13–17
Bjørn-Olav H. Eriksen*, Glenn Bitar, Morten Breivik and Anastasios M. Lekkas
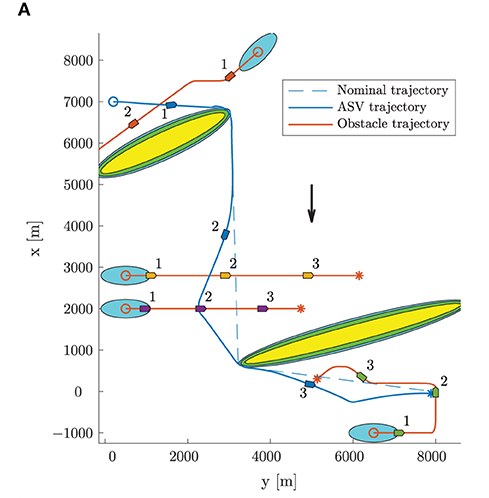
This paper presents a three-layered hybrid collision avoidance (COLAV) system for autonomous surface vehicles, compliant with rules 8 and 13–17 of the International Regulations for Preventing Collisions at Sea (COLREGs). The COLAV system consists of a high-level planner producing an energy-optimized trajectory, a model-predictive-control-based mid-level COLAV algorithm considering moving obstacles and the COLREGs, and the branching-course model predictive control algorithm for short-term COLAV handling emergency situations in accordance with the
COLREGs.
Previously developed algorithms by the authors are used for the high-level planner and short-term COLAV, while
those in this paper further develop the mid-level algorithm to make it comply with COLREGs rules 13–17. This includes developing a state machine for classifying obstacle vessels using a combination of the geometrical situation, the distance and time to the closest point of approach (CPA) and a new CPA-like measure.
The performance of the hybrid COLAV system is tested through numerical simulations for three scenarios representing a range of different challenges, including multi-obstacle situations with multiple simultaneously active COLREGs rules, and also obstacles ignoring the COLREGs. The COLAV system avoids collision in all the scenarios, and follows the energy-optimized trajectory when the obstacles do not interfere with it.
ROLLS
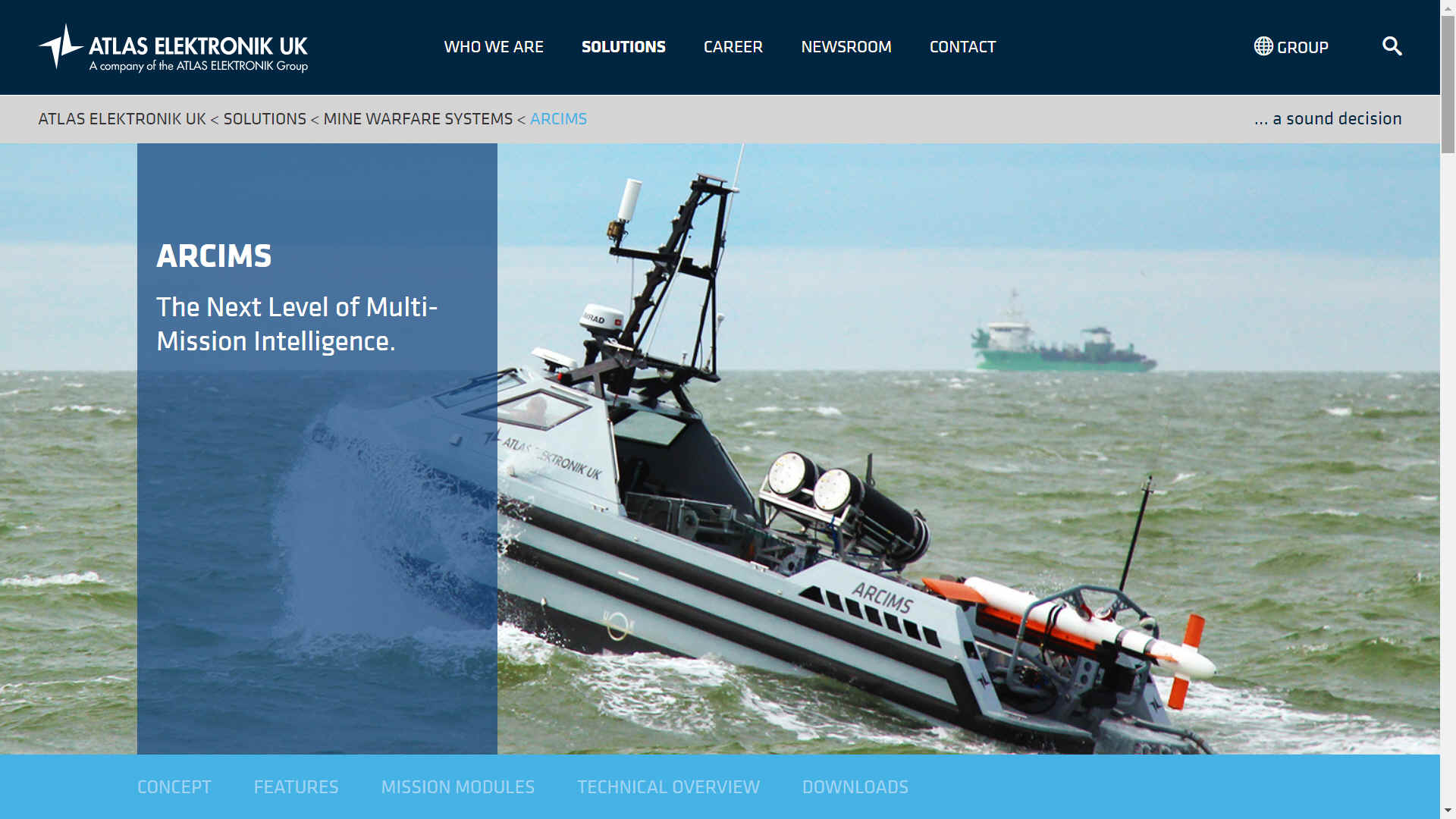
ROYCE MARCH 2018 - AUTONOMOUS VESSELS CAN MEET COLREGS
Rolls-Royce has completed a research project it says demonstrates that the operation of autonomous vessels can meet, if not exceed, current collision avoidance (COLREG) rules.
The MAchine eXecutable Collision regulations for Marine Autonomous Systems (MAXCMAS) project included partners Lloyd’s Register, Warsash Maritime Academy (WMA), Queen’s University Belfast and Atlas Elektronik (AEUK).
The team found that use of newly developed algorithms allowed existing COLREGs to remain relevant in a crewless environment, finding that artificial intelligence-based navigation systems were able to enact the rules to avoid collision effectively, even when approaching manned vessels were interpreting the rules differently.
A key aspect of the research was the use of WMA’s networked bridge simulators. The simulators were used to analyze reactions from the crew when faced with a range of real-world situations and subsequently hone the MAXCMAS algorithms.
Rolls-Royce Future Technologies Group’s Eshan Rajabally, who led the project, said: “Through MAXCMAS, we have demonstrated autonomous collision avoidance that is indistinguishable from good seafarer behavior, and we’ve confirmed this by having WMA instructors assess MAXCMAS exactly as they would assess the human.”
During the development project, Rolls-Royce and its partners adapted a commercial-specification bridge simulator as a testbed for autonomous navigation. This was also used to validate autonomous seafarer-like collision avoidance in likely real-world scenarios. Various simulator-based scenarios were designed, with the algorithms installed in one of WMA’s conventional bridge simulators. This also included Atlas Elektronik’s ARCIMS mission manager Autonomy Engine, Queen’s University Belfast’s Collision Avoidance algorithms and a
Rolls-Royce interface.
During sea trials aboard AEUK’s ARCIMS unmanned surface vessel, collision avoidance was successfully demonstrated in a real environment under true platform motion, sensor performance and environmental conditions.
“The trials showed that an unmanned vessel is capable of making a collision avoidance judgment call even when the give-way vessel isn’t taking appropriate action,” said Ralph Dodds, Innovation & Autonomous Systems Programme Manager at AEUK. “What MAXCMAS does is make the collision avoidance regulations applicable to the unmanned ship.”
The MAXCMAS technology and system has been thoroughly tested both at sea and under a multitude of scenarios using desktop and bridge simulators, says
Rolls-Royce, proving that autonomous navigation can meet existing COLREG requirements.
WARMONGERS
- Its a real shame that only the military seem to get priority funding
for such projects in the UK, USA and other G20 members. What the world
needs is more transparency, not more closed shop cloak and dagger. Such
concerns are not equal opportunity employers, openly discriminating in
society. Ultimately, it matters not who think they rule the world. Food
supply is the lowest common denominator. If you cannot feed the growing
population, it is civil war and mayhem. Forget world domination. The UK
is just as bad in Human
Rights terms, as the worst dictatorships. The only difference is the
UK (effectively) kills slowly as in Article 3 ECHR mental
torture and Article 14 castration
(Art 7 UNHR). What is worse, a soldiers death, or continuous
torture. Scotland Yard mercilessly tortured and imprisoned the
Suffragettes, in seeking to quash equality.
MAXCMAS project: Autonomous COLREGs compliant ship navigation. In
Proceedings of the 16th Conference on Computer Applications and Information Technology in the Maritime
Industries (COMPIT) 2017 (pp. 454-464)
Jesus Mediavilla Varas, Spyros Hirdaris, Renny Smith, Paolo Scialla, Walter Caharija, Zakirul Bhuiyan, Terry Mills, Wasif Naeem, Liang Hu, Ian Renton, David Motson, Eshan Rajabally
School of Electronics, Electrical Engineering and Computer Science
This paper discusses the concept and results of the MAXCMAS project, an approach to COLREGs compliance for autonomous ship
navigation. In addition to desktop testing, the system is being implemented and tested thoroughly on networked bridge simulators as well as on an unmanned surface vessel. Both bridge simulation-based and desktop-based results exhibit suitable collision avoidance actions in a one-on-one and multivessel ship encounters respectively. The eventual aim of the project is to demonstrate an advanced autonomous ship navigation concept and bring it to a higher technology readiness level, closer to market.
Title of host publication: Proceedings of the 16th Conference on Computer Applications and Information Technology in the Maritime Industries (COMPIT) 2017
Pages: 454-464
Number of pages: 11
Publication status: Published - 10 May 2017
Event: 16th International Conference on Computer Applications and Information Technology in the Maritime Industries - Cardiff, United Kingdom
Duration: 15 May 2017 → 17 May 2017

TECHNICAL PROVISIONS
The COLREGs include 41 rules divided into six sections: Part A - General; Part B - Steering and Sailing; Part C - Lights and Shapes; Part D - Sound and Light signals; Part E - Exemptions; and Part F - Verification of compliance with the provisions of the Convention. There are also four Annexes containing technical requirements concerning lights and shapes and their positioning; sound signalling appliances; additional signals for fishing vessels when operating in close proximity, and international distress signals.
THESE
ARE THE REGULATIONS:
Part A - General (Rules 1-3)
Rule 1 states that the rules apply to all vessels upon the high seas and all waters connected to the high seas and navigable by seagoing vessels.
Rule 2 covers the responsibility of the master, owner and crew to comply with the rules.
Rule 3 includes definitions of water craft.
Part B- Steering and Sailing (Rules 4-19)
Section 1 - Conduct of vessels in any condition of visibility (Rules 4-10)
Rule 4 says the section applies in any condition of visibility.
Rule 5 requires that "every vessel shall at all times maintain a proper look-out by sight and hearing.
Rule 6 deals with safe speed.
Rule 7 covering risk of collision, which warns that "assumptions shall not be made on the basis of scanty information, especially scanty radar
information."
Rule 8 covers action to be taken to avoid collision.
Rule 9
vessels proceeding in narrow channels should keep to starboard.
Rule 10 of the Regulations deals with the behaviour of vessels in or near traffic separation schemes.
Ships crossing traffic lanes are required to do so "as nearly as practicable at right angles to the general direction of traffic flow."

Section II - Conduct of vessels in sight of one another (Rules 11-18)
Rule 11 says the section applies to vessels in sight of one another.
Rule 12 states action to be taken when two sailing vessels are approaching one another.
Rule 13 covers overtaking - the overtaking vessel should keep out of the way of the vessel being overtaken.
Rule 14 deals with head-on situations. Crossing situations are covered by Rule 15 and action to be taken by the give-way vessel is laid down in Rule 16.
Rule 17 deals with the action of the stand-on vessel, including the provision that the stand-on vessel may "take action to avoid collision by her manoeuvre alone as soon as it becomes apparent to her that the vessel required to keep out of the way is not taking appropriate action.
Rule 18 deals with responsibilities between vessels and includes requirements for vessels which shall keep out of the way of others.
Section III - conduct of vessels in restricted visibility (Rule 19)
Rule 19 states every vessel should proceed at a safe speed adapted to prevailing circumstances and restricted visibility. A vessel detecting by radar another vessel should determine if there is risk of collision and if so take avoiding action. A vessel hearing fog signal of another vessel should reduce speed to a minimum.
Part C Lights and Shapes (Rules 20-31)
Rule 20 states rules concerning lights apply from sunset to
sunrise.
Rule 21 gives definitions.
Rule 22 covers visibility of lights - indicating that lights should be visible at minimum ranges (in nautical miles) determined according to the type of vessel.
Rule 23 covers lights to be carried by power-driven vessels underway.
Rule 24 covers lights for vessels towing and pushing.
Rule 25 covers light requirements for sailing vessels underway and vessels under oars.
Rule 26 covers light requirements for fishing vessels.
Rule 27 covers light requirements for vessels not under command or restricted in their ability to manoeuvre.
Rule 28 covers light requirements for vessels constrained by their draught.
Rule 29 covers light requirements for pilot vessels.
Rule 30 covers light requirements for vessels anchored and aground.
Rule 31 covers light requirements for seaplanes
Part D - Sound and Light Signals (Rules
32-37)
Rule 32 gives definitions of whistle, short blast, and prolonged blast.
Rule 33 says vessels 12 metres or more in length should carry a whistle and a bell and vessels 100 metres or more in length should carry in addition a gong.
Rule 34 covers manoeuvring and warning signals, using whistle or lights.
Rule 35 covers sound signals to be used in restricted visibility.
Rule 36 covers signals to be used to attract attention.
Rule 37 covers distress signals.
Part E - Exemptions (Rule
38)
Rule 38 says ships which comply with the 1960 Collision Regulations and were built or already under construction when the 1972 Collision Regulations entered into force may be exempted from some requirements for light and sound signals for specified periods.
Part F - Verification of compliance with the provisions of the Convention
(Rules 39
- 41)
The Rules, adopted in 2013, bring in the requirements for compulsory audit of Parties to the Convention.
Rule 39 provides definitions.
Rule 40 says that Contracting Parties shall use the provisions of the Code for Implementation in the execution of their obligations and responsibilities contained in the present Convention.
Rule 41 on Verification of compliance says that every Contracting Party is subject to periodic audits by
the IMO.
ANNEXES
The COLREGs include four annexes:
Annex I - Positioning and technical details of lights and shapes
Annex II - Additional signals for fishing vessels fishing in close proximity
Annex III - Technical details of sounds signal appliances
Annex IV - Distress signals, which lists the signals indicating distress and need of assistance.

TOP
TEN REASONS FOR ACCIDENTS AT SEA
The health of the
blue economy is tied significantly to the safety of maritime
transportation. Taking steps to reduce the number of maritime accidents is beneficial
for the safety of human life and equipment and the prosperity of any nation’s
economy.
A Report by the
US's National Transport Safety Board (NTSB) in 2016 outlined the top ten reasons for accidents at sea:
1. Fatigue
The NTSB report indicates that fatigue is one of the most common reasons for transportation accidents, and reducing this cause is a top priority. Mariners should be aware of how sleep loss affects their performance and should refrain from accepting a watch while in a state of fatigue that renders them unfit for duty. In such instances, mariners should prearrange for another qualified individual, i.e. a
watch-stander, to serve in their place when possible. If this is not possible, mariners should refuse duty until they are adequately rested and able to safely execute their responsibilities.
2. Standard Maintenance and Repair Procedures
Very often accidents are simply caused by the failure of one or more individuals to operate according to standardized procedures involving testing, repair and maintenance of equipment. Individuals conducting these procedures must use the correct parts and tools and also ensure system integrity and safe equipment operations according to the appropriate specifications.

3. Use of Medication While Operating Vessels
Using medication in an unsafe manner as a member of a maritime crew can have disastrous results. Mariners should consult with an appropriate medical professional prior to using any type of medication, whether over-the-counter or prescribed. Also, the use of certain medications by credentialed mariners may disqualify them from operating a vessel, including alcohol abuse.
4. Operational Testing Procedures
Standardized procedures should always be used when testing equipment. Optimally, the testing should be performed at normal operating pressures and loads – this can help verify the reliability and quality of the repair or maintenance work performed. All sensors and alarms within vessels should be tested routinely to verify the reliability of their operation and their capability of providing adequate warning to crew members.
5. Familiarization with Local Recommendations
It’s important for vessel operators to have familiarity with and heed the recommendations of local specialists in the maritime industry as well as pertinent publications, including the United States Coast Pilot and others. Failure to do so may result in unnecessary accidents.
6. Underestimating Strong Currents
Mariners can face significant challenges when operating in high water with currents that are more powerful than normal. Under such conditions, the ability to maneuver may be diminished significantly and the risk of parting lines or dragging anchor may be increased. It’s vital for operators and owners to encourage their mariners to properly assess dangers, and remain aware of prevailing conditions. As well, they must take into consideration the guidance of authoritative entities such as the Coast Guard – and from this information takes steps to minimize risks. In particular, the “downstreaming” maneuver often performed by inland towers is risky when strong currents are present.
7. Bridge Resource Management
When pilots are faced with limited reaction times and hazards are close at hand, it’s important to have all possible resources available for use in order to help ensure the safe operation of vessels, including human resources and equipment. The utilization of these resources falls under Bridge Resource Management.
8. Proper Safety Equipment
It’s vital that owners, operators and crewmembers of a vessel do their part to ensure the proper maintenance and functioning of safety equipment on the vessel. As well, they should ensure the vessel is equipped with the necessary safety equipment to handle emergencies and provide the best chance of survival for all on board.

SMART PHONE
APP
- You can now get an app for your android or iphone for free.
9. Distractions
A very high priority as it concerns safety improvements involves the minimization of distractions. Although it is necessary for operators to communicate with dispatchers and crewmembers as well as conduct other work duties involving the checking of equipment and instruments, anything that hinders proper vessel operation can result in tragic outcomes.
10. Access to High Risk Spaces
The importance of high risk spaces, in particular those with hull penetrations, remaining freely accessible. If these spaces are blocked, a safety hazard exists and operators may be hindered from responding to flooding and other types of emergencies when and if they occur.

How
did this happen? The answer is that they did not have autonomous
navigation aids onboard. They relied on humans.
VESSEL
OPERATION MODE CIRCUIT SELECTIONS
COLLISION
AVOIDANCE PROGRAM - FOR AUTONOMOUS SHIPS
FULLY
COMPLIANT WITH COLREGS
CIRCUIT
KEY:
Autonomous
mode _______ select to engage fully
automatic ship control
Manual
mode
_______ select this to allow an onboard crew to take control
Drone
mode
_______ selection for controlling the ship remotely via satellite
Collision
avoidance
________ disengages autopilot when danger arises
Part
A - General (Rules 1-3) & Part B- Steering and Sailing Section 1 -
Conduct of vessels in any condition of visibility (Rules 4-10)
Rule
1 states that the rules apply to all vessels on
the high seas and connected waters.
Rule
2 covers the responsibility of the master, owner
and crew to comply with the rules.
Rule
3 includes definitions of applicable water
craft (vessels).
Rule
4 says the section applies in any conditions of
visibility.
Rule
5 every vessel shall at all times maintain a
proper look-out by sight and hearing.
Rule
6 deals with safe speed.
Rule
7 risk assumptions shall not be made on scanty
(radar) information.
Rule
8 covers action to be taken to avoid collision.
Rule
9 vessels proceeding along a narrow channel should
keep to starboard.
Rule
10 deals with the behaviour of vessels in or near
traffic separation schemes.
Sections
II & III Conduct of Vessels in Sight of one
another
Part
C - LIGHTS & SHAPES (Rules
20-31)
Part
D - SOUND AND LIGHT SIGNALS - DEFINITIONS (Rules
32-37)
Part
E - EXEMPTIONS - Rule
38
Part
F - Convention compliance verification provisions Rules 39
- 41
Annex
I - Positioning and technical details of lights
and shapes
Annex
II - Additional signals for fishing vessels fishing in
close proximity
Annex
III - Technical details of sounds signal
appliances
Annex
IV - Distress signals indicating distress and need
of assistance

International Maritime Organization
(IMO)
4 Albert Embankment, London SE1
7SR
United Kingdom
+44 (0) 20 7735 7611

ARCHINAUTE:
A wonderfully innovative rotary sail catamaran that can head directly into the wind.
The wind turbine generates electricity to drive a propeller via an
electric motor. Ordinary
sailing craft have to tack when beating upwind. This is another example
of a changing world that the IMO, G20
and EC have not anticipated, or made
allowances for.
LINKS
& REFERENCE
https://www.frontiersin.org/articles/10.3389/frobt.2020.00011/full
https://www.frontiersin.org/articles/10.3389/frobt.2020.00011/full
https://pure.qub.ac.uk/en/publications/maxcmas-project-autonomous-colregs-compliant-ship-navigation
https://www.uk.atlas-elektronik.com/solutions/mine-warfare-systems/arcims.html
https://pure.qub.ac.uk/en/publications/maxcmas-project-autonomous-colregs-compliant-ship-navigation
https://pureadmin.qub.ac.uk/ws/portalfiles/portal/129886124/MAXCMAS_paper_2017_submitted.pdf
https://www.professionalmariner.com/rolls-royce-autonomous-vessels-can-meet-colregs/
https://www.maritime-executive.com/article/autonomous-ships-can-use-colreg-rules-effectively
http://inoa.net/zeilen/colreg.html
http://gosailing.info/collision-regulations-colregs/
https://www.blue-growth.org/COLREGS_COLLISIONS_AT_SEA_REGULATIONS_IMO_PREVENTION_CONVENTION_NAVIGATION_RULES.html
http://www.solarnavigator.net/boats/collision_at_sea_regulations_colregs.htm
https://www.rya.org.uk/newsevents/e-newsletters/inbrief/Pages/do-you-know-your-colregs.aspx
https://www.imo.org/en/About/Conventions/Pages/COLREG.aspx
https://www.bluebird-electric.net/COLREGS_International_Regulations_for_Preventing_Collisions_at_Sea_1972.htm